Principal Investigators: Geoffrey Thun, Kathy Velikov, and Wes McGee (RVTR + Matter Design). Project Coordinator/Research Associate: Dan Tish
Project funded by the Taubman College 2016 Research Though Making Grant and University of Michigan Office of Research.
Honorable Mention - Architect Magazine 2016 R+D Awards
Project Description
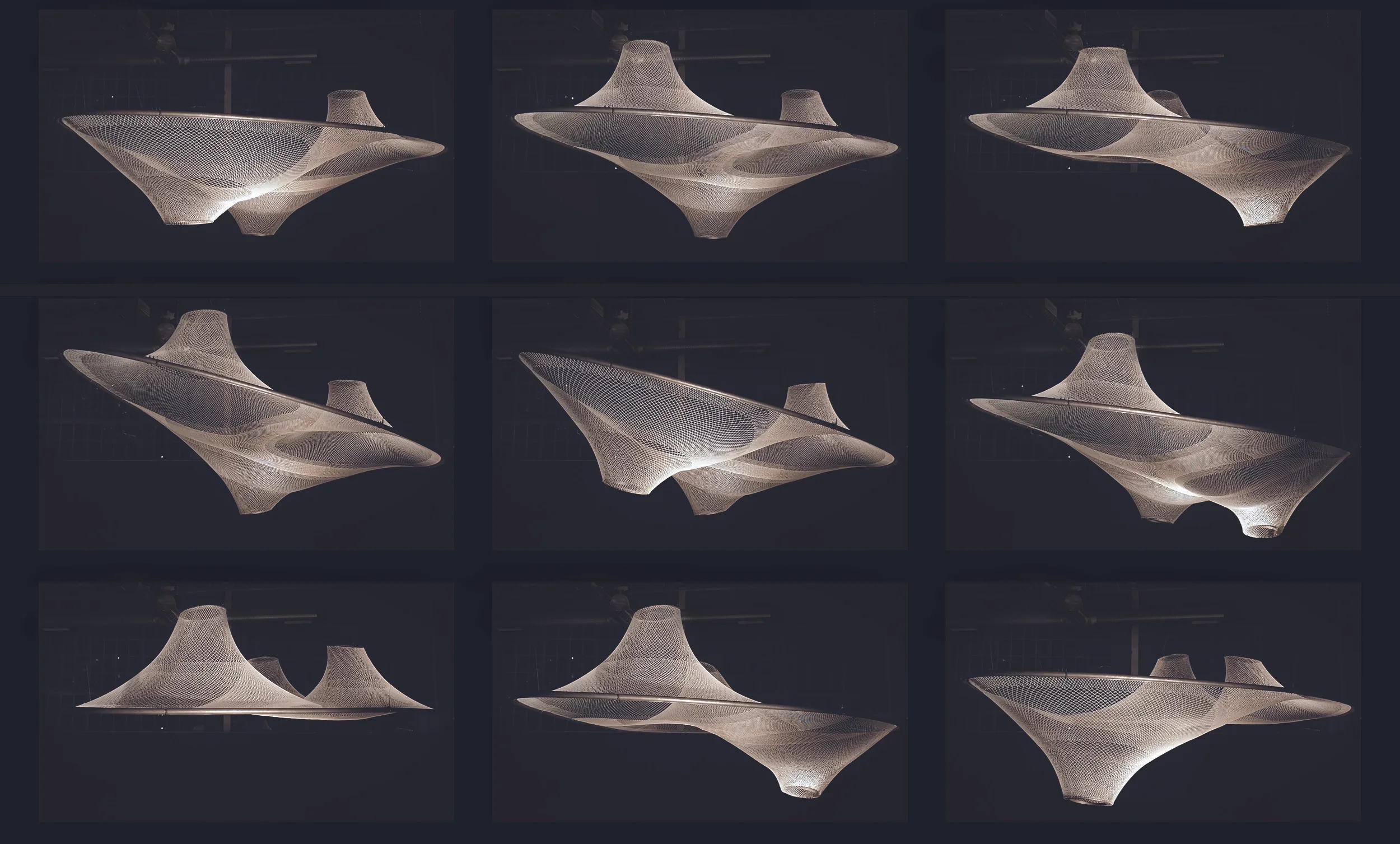
This project explores actuated environments: spaces which can be rapidly reconfigured in real-time, to suit changing programmatic and performative demands, integrated with interactive capacities. The work advances research in cable-based robots for architectural applications, research in computational design environments for kinetic architectures, and research in the production of extruded elastomeric tensile meshes. These research streams are combined to produce a controllable, dynamically reconfigurable spatial enclosure. The project has produced a distributed motion control system that can be utilized to support continuing experimentation with actuation through a range of material and spatial configurations. A physics engine-based design environment has been developed to enable designers to translate kinetic surfaces into working prototypes through an open-source visual programming interface, coupled with an industry- standard software motion controller. A parallel stream of material research has advanced the development of a robotic extrusion printer for thermoplastic elastomers, and the development of “flat to form” geometries that allow two-dimensionally printed mesh-lattices to be tensioned into funicular forms.
Flat2Form Geometry
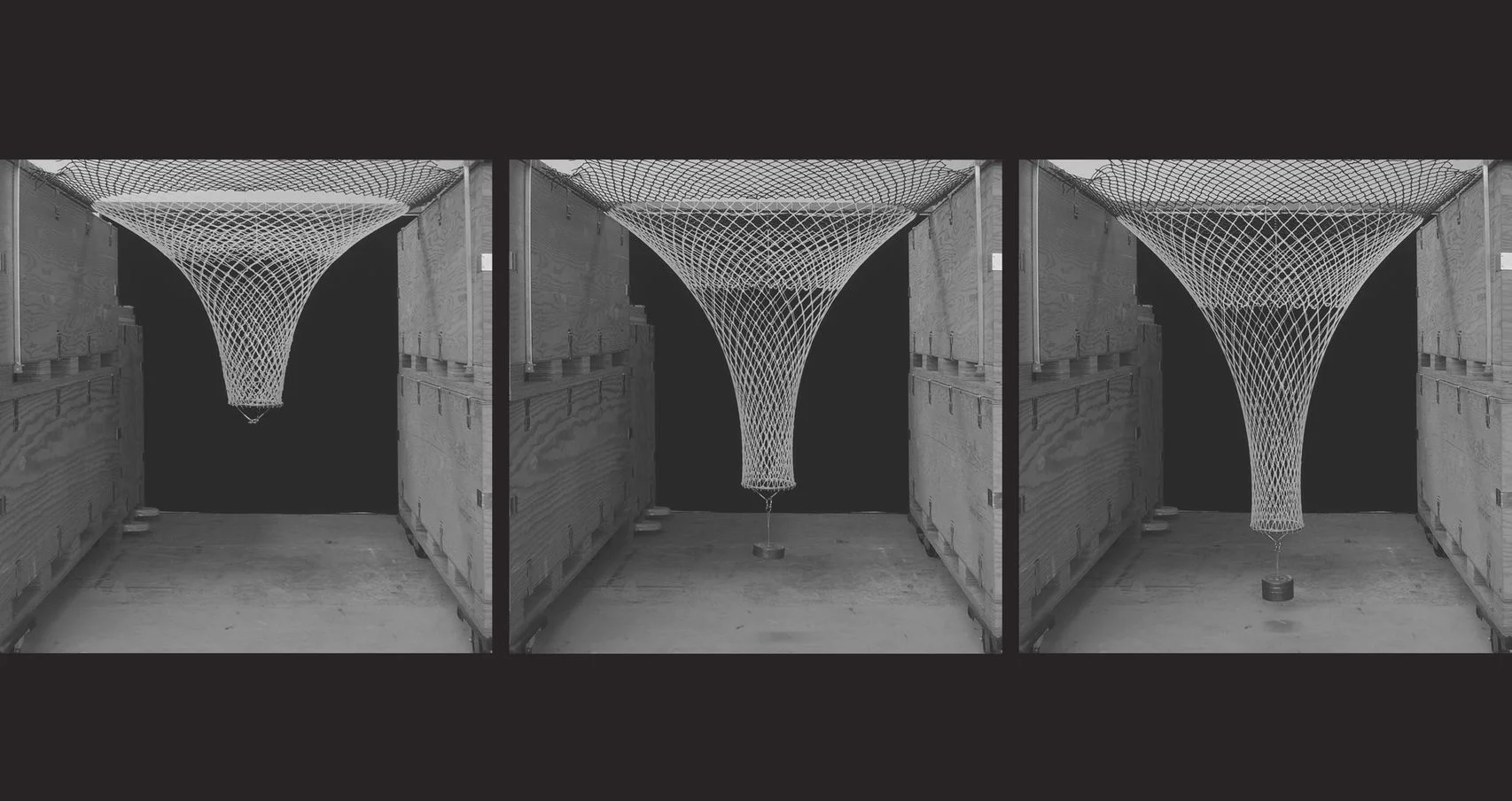
The question of how to achieve tailored, stretched forms was approached through the basic principle that a by introducing a curve instead of a line between two nodal points, a greater working length under loading can be achieved. By setting a target length derived from the loaded mesh form, it would therefore be possible to control the resultant length of every individual mesh edge, making it possible to program a range of naturally stressed three-dimensional forms into the flat pattern.
Robotic TPE Extrusion
To fabricate the piece, a new thermoplastic extrusion end effector was developed. The extruder was fed pellets of a custom compounded thermoplastic elastomer (TPE) that had a very high elongation at break as well as low melt flow index. The robotic paths were programmed using Super Matter Tools, developed previously by Wes McGee and Dave Pigram. To facilitate the full fusion of all of the intersecting joints, heartbeat shaped micro-geometries were scripted into the extrusion paths.